
This is an old revision of the document!
Table of Contents
Master and Control Board
Model No. ICE-MC1
Document Revision: 1.0
Document Last Updated on 2021/08/26 14:26
Please read Limited Warranty and General Warnings and Cautions prior to operating the ICE-MC1.
Description
The Master and Control Board processes communication between individual ICE boards and external devices. It translates serial text commands into binary commands sent to the proper ICE board. It also distributes power to individual ICE boards, properly sequencing power to the boards and has power safety protection.
Absolute Maximum Ratings
Note: All modules designed to be operated in laboratory environment
| Parameter | Rating |
|---|---|
| Environmental Temperature | >15°C and <30°C |
| Environmental Humidity | <60% |
| Environmental Dew Points | <15°C |
Specifications
| ICE-MC1 | Units | |
|---|---|---|
| Input Power Requirements | ||
| <html> </html> 5V line | >5 | A |
| <html> </html> 15V line | >1.5 | A |
| <html> </html> -15V line | >1.5 | A |
| Maximum Power Consumption1) | ||
| <html> </html> 5V line | 10 | A |
| <html> </html> 15V line | 3 | A |
| <html> </html> -15V line | 3 | A |
| Slave Boards | ||
| <html> </html> Max Number of Slave Boards | 8 | |
| Communication Methods | ||
| <html> </html> I2C Bus | ||
| <html> </html> TTL Serial (3.3V) |
I/O
Only for OEM versions of the ICE-MC1 purchased without the ICE-Box
The diagram below shows most of the pin definitions for the ICE-MC1.
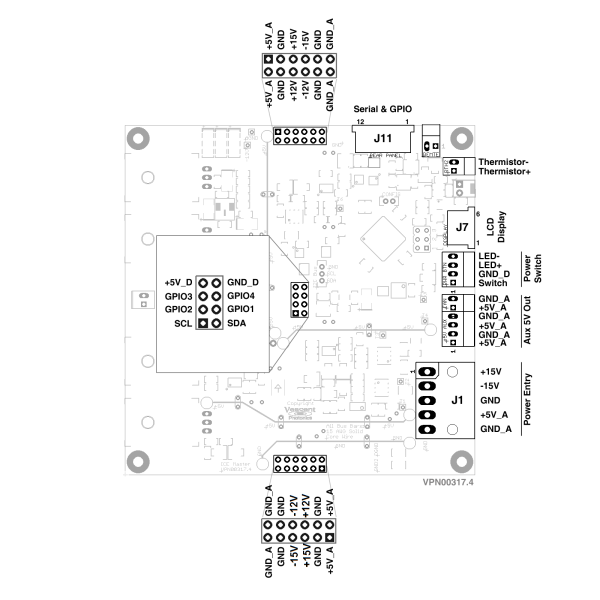
Power Entry Connector
Power is provided at J1 (Molex P/N: 0039303056). Pin definition shown in figure above. The return current path for +5V_A is GND_A. This wiring connected to this return path should be capable of carrying the maximum current of the +5V_A line. The signals GND and GND_A are shorted together on the circuit board through a jumper, but this can be removed.
Serial & GPIO Connector
Communication with the Master Controller and daughter modules is done through flat flex connecter J11. This connector contains two USART bi-directional communication busses, event system GPIO pins, and a safety interlock signal. J11 is a 12-pin 1.00mm pitch flat flex connector (FCI SFW12R-1STE1LF) with a pin definition of:
| Pin | Signal |
| 1 | 3.3V (50mA max) |
| 2 | TXO_Serial1 |
| 3 | RXI_Serial1 |
| 4 | TXO_Serial2 |
| 5 | RXI_Serial2 |
| 6 | Ground |
| 7 | GPIO1 |
| 8 | GPIO2 |
| 9 | GPIO3 |
| 10 | GPIO4 |
| 11 | Ground |
| 12 | Safety Interlock |
Serial
This provides two independent asynchronous serial interfaces (USART) to communicate with the ICE-MC1. The serial interface operates at 3.3V signalling levels, 115200 Baud, '8N1' (8 bit, no parity, 1 stop bit). Bus idle state is high (3.3V). The comm (or serial) port to use will be chosen by the USB host computer. See commands overview page for usage of the serial port. One can be assigned to a USB↔Serial interface if desired. The TXO (transmit out) and RXI (receive in) nomenclature is from the perspective of the device external to the Master Controller. TXO is for an external device transmitting data into the ICE-MC1. RXI is for the ICE-MC1 sending data out to an external device. Either USART bus can be used to receive commands, but not simultaneously (e.g. interleaved). In the ICE Platform Enclosure, USART channel 1 is assigned to a USB↔Serial converter and USART channel 2 is assigned to an external connector for direct TTL serial control from an embedded system or DAC card.
GPIO
The GPIO pins are used for event system signalling. Voltage signalling is at 3.3V, active low. Pin definitions and usage is detailed in the Event System section.
Safety Interlock
The safety interlock signal prevents the Master Controller from releasing the safety interlocks on all attached daughter boards. The safety interlock is only applicable to daughter boards that have laser controllers. Without the safety interlocks released, daughter boards are prevented from powering on lasers. The safety interlock signal floats high to 3.3V and must be pulled down to ground to release the interlocks. This pin can be permanently shorted directly to ground if safety interlock functionality is not required.
REMOTE Supply Connector
This connector, located next to J11, is for internal enclosure use. It is used to send a power on signal to a remote power supply when the power switch is depressed. Consult Vescent for use of this connector.
Thermistor Connector
A 10k NTC thermistor can be connected to this connector to enable the Master Controller to measure a case temperature. When temperature exceeds a set threshold, the Master Controller can shutdown power to the daughter boards.
LCD Display
For internal use only.
Power Switch
A momentary push button switch can be connected from SWITCH to GND_D. Briefly pulling SWITCH to ground (for longer than 10 ms) will toggle power to the Master Controller and daughter boards. When powering down, the switch will wait 1 second before turning off power the the Master Controller, allowing the Master Controller time to safely shutdown all daughter boards. The default behavior is that when power is applied to the Master Controller through the Power Entry connector, the board remains in an completely power off state (including the microcontroller on the Master Controller) and no serial commands will be acknowledged. The SWITCH signal must be pulled low to turn on the Master Controller, after which commands can be sent to power on or off the daughter boards. The LED+ and LED- signals can be connected to an LED to indicate power state. LED+ is connected 5V and LED- is connected through a 249 Ohm resistor and transistor to ground.
Note: The power switch functionality and default power on behavior can be changed at the factory if these features are not needed.
AUX 5V Out Connector
This connector provide 5V to high current devices. Some daughter board will require more than 3A of current on the 5V rail, and these connectors allow point to point wiring of 5V to reduce voltage drop while drawing large currents (instead of through the system power bus).
Internal Bus Headers
The Master Controller routes power and communications to daughter modules through a set of 3, 0.1“ pitch pin headers located on either side of the board and in the middle. The Master Controller routes the raw 5V_A, +15V, and -15V to these headers from the main power entry connector through power conditioning circuitry. The power conditioning circuitry consists of electronic fuses for protection against fast transients, reverse polarity protection, overvoltage and undervoltage detection, and overcurrent protection on each power rail. The Master Controller will clamp inrush current when power is applied to the daughter modules so that the main power supply feeding the power entry connector does not experience power sag during turn on. Should a fault condition occur on either the 5V, +15V, or -15V line, the Master Controller will shutdown all power rails safely. The +12V and -12V power rails are regulated from the 15V inputs on the Master Controller with low-dropout regulators. The center header, which contains 5V_D power for digital circuitry, also carries the Event System GPIO lines and the global I2C communications bus (SDA and SCL).
Quick Start Commands Guide
Please see Overview of Commands and Basic Usage and Master Board CommandList for more details. All serial commands that go to the ICE-CM1 are prefixed with a ”#“ are routed to an individual slave board. For example, the command #Devices is a ICE-CM1 command that lists all the attached ICE slave boards and their address number. For example:
#Devices Devices: 1: Temp Controller 2: None 3: Current & OPLS 4: Current & Peak Lock 5: None 6: Temp Controller 7: Current & Peak Lock 8: None
The #Slave command sets what device to talk to. In the above example, there is a Quad Temperature Controller (ICE-QT1) on slots 1 and 6. To tell the ICE-MC1 to communicate with the ICE-QT1 in slot 6, send the command:
#Slave 6
The #Slave command is persistent: all subsequent commands will be routed to the ICE-QT1 on slot 6 until the #Slave command is run again. At this point to query to temperature setpoint on the ICE-QT1's third temperature channel, send the command:
TempSet? 3 25.7
Because the command TempSet does not start with a ”#“, the ICE-MC1 knows that the command is for a slave board. So it converts the string “TempSet? 3” into binary and sends it over I2C bus to ICE-QT1 on slot 6. The ICE-QT1 sends binary data back to the ICE-MC1 and the ICE-MC1 converts into a string representing the temperature setpoint and sends “25.7” over the serial line.